

2021-02-16医疗机器人创新中心
前言
2020年,新冠疫情汹汹来袭,消杀机器人、转运机器人、远程看护机器人等医用机器人,协助医护人员一起,抗击疫情。巡诊机器人可以代替医护人员进入病房,执行简单诊疗操作,提高了医护工作效率,降低院内感染风险,也大大节省了防护服、护目镜等防护资源。美国华盛顿埃弗里特普罗维登斯地区医疗中心使用InTouch Health的巡诊机器人,治疗了美国首例新型冠状病毒肺炎患者。基于巡检机器人等技术,疫情期间国内科研院所、企业积极研发巡诊机器人,已有一批巡诊机器人逐步投入使用。
全球疫情呈现常态化趋势,无接触诊疗的需求回落,巡诊机器人在医院能否持续使用,在中国医院是否仍是刚需?
一、我国医疗资源现状
总体来讲,我国的医疗资源水平,特别是重症监护单元(ICU)资源,距发达国家仍有一定的差距。2018年《柳叶刀》发布的全球医疗质量和可及性(HAQ)指数榜单中,大多发达国家指数已超过了80,前三名的国家冰岛、挪威、荷兰的得分分别是97.1、96.6、96.1,中国大陆得分为77.9分。2018年,中国每千人拥有的执业医师人数仅2.16人,医生密度与发达国家相比还有一定差距,例如法国、澳大利亚和瑞士等国每千人拥有接近4名医生。二、 巡诊机器人国内外发展
国际上,医用机器人已用于巡诊,但大都只能满足病人远程监护、远程交流、转运药品和食物等单一场景功能。疫情爆发后,以钛米、艾米为代表的一批机器人在武汉抗疫一线与医生共同奋战。中国工程院田伟院士领导组织研发的智能巡诊机器人,清华大学郑钢铁教授与董家鸿院士联合研发的巡诊机器人,也逐步投入使用。
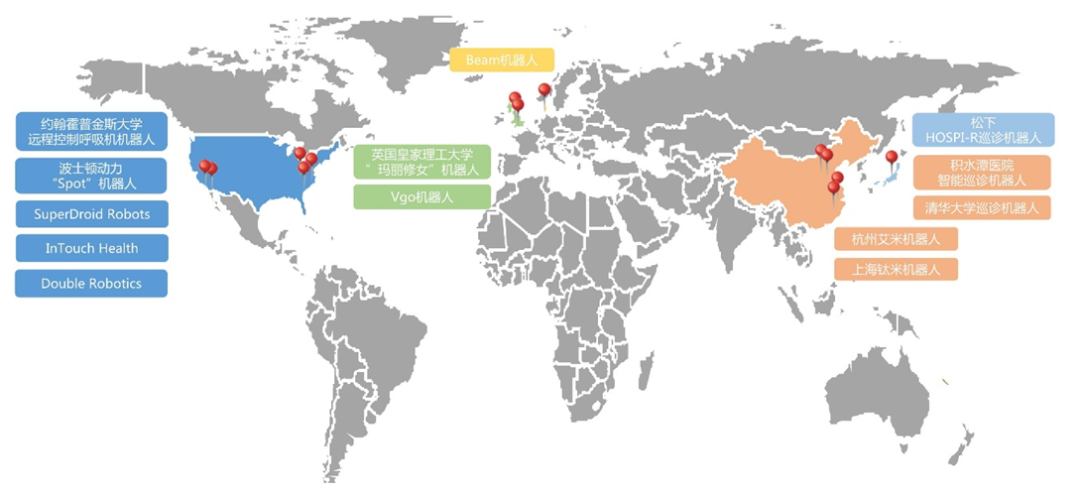
美国InTouch Health公司旨在提供远程虚拟医疗平台,为患者和医生提供从医院到家庭的虚拟医疗平台和集成设备服务。InTouch Health研发设计了一系列可用于远程医疗的机器人,可实现远程查房、检查生命体征、医患沟通等功能。

InTouch Vici巡诊机器人 资料来源:InTouchHealth
约翰霍普金斯大学Russell Taylor教授研究团队设计的机器人系统,可远程控制呼吸机和其他床旁设备。机器人旨在解决ICU使用呼吸机病人的护理问题。医护人员每次进入病房,即使只需要对呼吸机做微小的调整,都需要消毒并且更换防护装备,这既浪费了医护人员的宝贵时间,也极快地消耗有限的医疗防护装备。

疫情爆发以来,波士顿布里格姆妇女医院一直在测试使用波士顿动力公司的“Spot”机器人辅助治疗新冠患者。“Spot”机器人减少了医护人员与患者的接触,保护了医护人员,也减轻了防护用品供应的压力。

“Spot”机器人 资料来源:波士顿动力
2020年5月,Tygerberg医院尝试使用Double Robotics的“Quintin”机器人,对ICU中的新冠患者进行巡诊。“Quintin”搭载使用混合现实视频技术,导航效果更好,搭载3D传感器,实现自动驾驶。

“Quintin”机器人 资料来源:DoubleRobotics
钛米机器人的巡诊机器人已于2019年在仁济医院等医院投入使用,可提供病人生命体征测量、送药、巡检、查房等病房服务。机器人进入病区后,会每隔两个小时自动前往每个病房,人脸识别患者后为患者提供生命体征检测、发药、服药说明告知等服务。

钛米机器人 资料来源:上海钛米机器人
杭州艾米机器人有限公司的M1型机器人可以作为医院远程巡诊系统,实现语音咨询、自动导航、远程通话/视频、健康管理、高级陪伴等功能。

智能抗疫机器人 资料来源:杭州艾米机器人
疫情爆发后,中国工程院田伟院士牵头组织研发了智能巡诊机器人。机器人已在北京佑安医院ICU病区进行了智能巡诊机器人功能试验,机器人在病房自主建图,自主规划路径,自主行走,进行医用器皿的视觉识别和机械臂自主抓取,完成医疗废物的遥控自主转运,各项指标符合设计要求,通过了临床适应性验证。

智能巡诊机器人 资料来源:积水潭医院
清华大学航天航空学院教授郑钢铁和清华大学精准医学研究院院长、北京清华长庚医院执行院长董家鸿牵头研发了一款巡诊机器人。根据抗疫一线医生需求,巡诊机器人具备测量体温、听诊、超声和咽拭子采样等功能,且医生可以远程同时控制多台。两台巡诊机器人样机已分别在地坛医院和武汉协和医院进行测试和优化。

三、 小结
2020年疫情的爆发带来了医疗行业的新场景,无接触就诊和诊疗的需求迸发,为巡诊机器人带来了新的机遇。巡诊机器人对比手术机器人,操作精度要求并不高,但在如何更好融入临床场景方面,要求较高。换句话说,巡诊机器人能否最大化满足ICU、隔离病房、普通病房多样化的场景下的临床需求,切实减轻医护工作量,是机器人能否在医院持续使用的关键。
参考文献:
1. 田伟.我国智能骨科手术体系的建立及应用[J].骨科临床与研究杂志,2020,5(03):129-130.
2. 倪自强,王田苗,刘达.医疗机器人技术发展综述[J].机械工程学报,2015,51(13):45-52.
3. 徐昱琳,陈灵,李昕,杨傲雷,龙嫣然,朱春利,刘彦伯,金玉章.远程巡诊服务机器人系统设计[J].系统仿真学报,2018,30(09):3238-3248.
4. Christine Connelly BSc,Lyndsey Jarvie BN (Hons), MSc, Malcolm Daniel MBChB, et al. Understanding whatmatters to patients in critical care: An exploratory evaluation. 2020,25(4):214-220.
5. 王少成,吕荣鑫,于福超,刘明昆.智能巡检机器人设计[J].中国科技信息,2020(23):80-81+83.
6. 张辉,王耀南,易俊飞,钟杭,刘理,缪志强,江一鸣.面向重大疫情应急防控的智能机器人系统研究[J].中国科学:信息科学,2020,50(07):1069-1090.
7. 未艾.用机器人辅助查房有助于缩短病人住院时间[J].中国医疗器械杂志,2007(04):238
8. 规划发展与信息化司.2019年我国卫生健康事业发展统计公报[EB/OL].http://www.nhc.gov.cn/guihuaxxs/s10748/202006/ebfe31f24cc145b198dd730603ec4442.shtml,2020-06-06.
9. 王春亭,陈曼,于凯江,张琳琳,邱海波,杨毅,管向东,诸杜明,曹同瓦,陈德昌,孙仁华,严静,于荣国,林建东,刘宝,何先弟,钱克俭.重症医学:华东地区现状调查(2015年第三次ICU普查)[J].中华重症医学电子杂志,2016,2(01):43-49.
10. 陈芳.美国ICU护理管理概况[J].护士进修杂志,2018,33(10):952-954.
11. Reynolds Eliza M, GrujovskiAndre, Wright Tim, et al. Utilization of robotic "remote presence"technology within North American intensive care units.. 2012, 18(7):507-15.
12. Sai Krishna Pathi, AnnicaKristoffersson, Andrey Kiselev, et al. F-Formations for Social Interaction inSimulation Using Virtual Agents and Mobile Robotic Telepresence Systems. 2019,3(4)

